
发布日期:2022-10-11 来源:环球电气之家 作者:环球电气之家 点击率:2288 品牌:组态王_Kingview
看看来自与官方的发那科工业机器人主要参数介绍。
重复定位精度、可动范围、手部负载,这些术语究竟代表些什么?
接下来介绍的是发那科机器人的主要参数
看完后相信你会对机器人参数不再陌生。
使用机器人时应保证机器人的负载条件在手部允许负载线图所示范围内。机型不同,法兰盘不同,其手部负载条件不同。详情参阅相关手部允许负载线图。此处以R-2000iB/165F,ISO法兰盘为例:
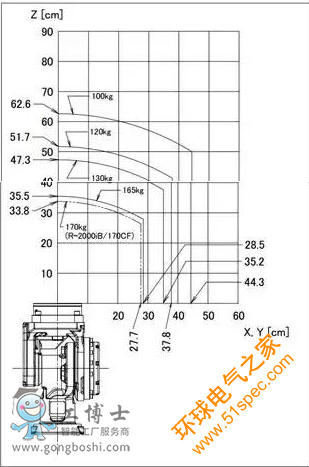
图一:手部允许负载线图(R-2000iB/165F,ISO法兰盘)
发那科机器人有2轴、3轴、4轴、5轴和6轴机器人。

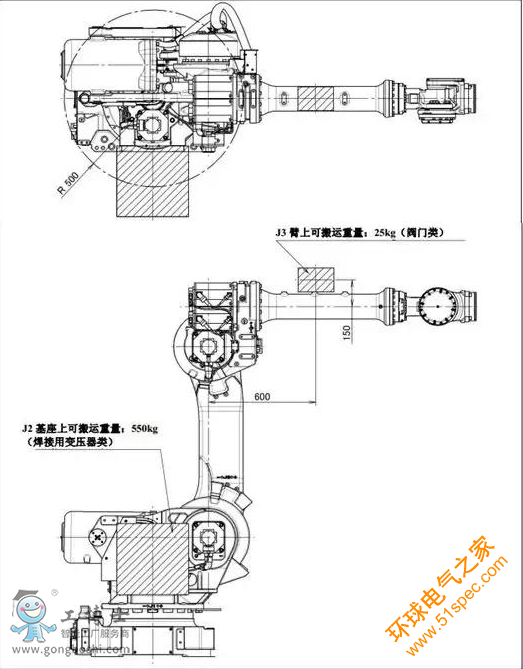
各机型的J2机座/J3手臂/J3外壳上的负载条件请参考其机型机构部操作说明书。此处以R-2000iB/165F为例:
图三:J1、J2、J3轴机械式制动器位置(R-2000iB/165F)
机器人的安装方式有:地面安装,顶吊安装,高台安装,倾斜角安装。具体机型的安装方式详见其机构部操作说明书。
此处列举部分机型的安装方式:
地面安装:R-2000iB/165F;顶吊安装:R-2000iB/150U;高台安装:R-2000iB/200R;倾斜角安装:LR Mate 200iD

重复定位精度指的是机器人重复到达一个位置的精度。各机型的重复定位精度请参考其机型机构部操作说明书中的规格一览表。此处以LR Mate 200iD为例:LR Mate 200iD的重复定位精度为±0.02mm。
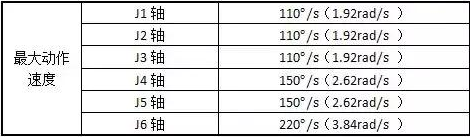
大动作速度指机器人运动时各轴所能达到的高速度。各机型各轴的大运动速度请参考其机型机构部操作说明书中的规格一览表。 注:短距离移动时有可能达不到各轴的高速度。此处以R-2000iB/165F为例:
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV


