
发布日期:2022-04-20 点击率:45
引言
针对串励直流电机,从转矩一转速特性可见,其转速随转矩增加而迅速下降,这种机械特性称为软特性。如果转矩很小,则转速将达到很高,可使电枢遭到破坏。本文提出了通过引入同步Buck电路对供电侧电压稳定控制,电机转速值往往受到噪声影响而不准确,设计了一个嵌入MATLAB块来实现卡尔曼滤波器构建,对电机输出的转速信号进行预测控制,从而滤波器能实现增益的计算。在电源侧采用了IGBT组成的同步Buck电路,相比传统Buck电路为电机提供了更加高效可靠的电力。
1供电侧同步Buck电路
传统Buck变换器如图1所示。L为滤波电感,C为滤波电容,R为负载,开关管s一般采用功率MosFET管,整流管D一般采用肖特基二级管。通过对开关管s进行脉宽调制(Pu1sewi4thMo4u1ation,PwM),则可以通过控制开关管的导通时间进而控制电感的充放电,从而能够实现变换器的降压功能。
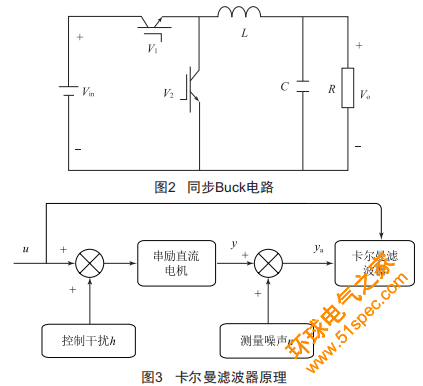
同步整流Buck电路是通过采用IGBT取代传统Buck变换器中的二极管而得到,如图2所示。主开关管与同步整流管需要交替导通,在两个开关管进行切换的时候,设置适当的死区时间能够避免两个开关管同时导通的危险,同步Buck电路为串励直流电机拥有高效稳定的电源提供了保障。
2卡尔曼滤波器
当今社会,过程噪声和测量噪声存在于生产生活的各个领域,大多数过程噪声和测量噪声属于多维非平稳随机过程信号。针对时变性、功率谱不确定的问题,提出基于卡尔曼滤波算法使信号的未来值尽可能接近真值。利用此算法最大优势是只需记录当前值,利用卡尔曼递推的5个公式算法,即可求出所需最优值。卡尔曼滤波器原理如图3所示。
对于离散域线性系统:在到达m点时刻,式(1)为空间状态矢量计算方程,式(2)为观测矢量计算方程。

式中,D为系统状态:E为控制矩阵:F为观测矩阵:h(m)和n(m)分别为m时刻过程测量信号和噪声测量信号。
(1)最佳预估计:

(2)预估计误差方案:

(3)卡尔曼增益:

式中,2、R为随机噪声h、n的协方差矩阵。
(4)更新估计:

(5)更新后估计协方差:
(6)滤波器输出:

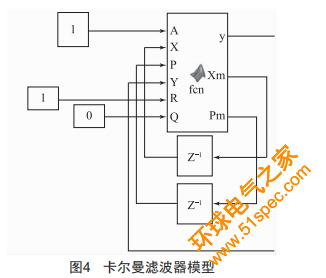
卡尔曼滤波器模型如图4所示。
3电机转速估测仿真
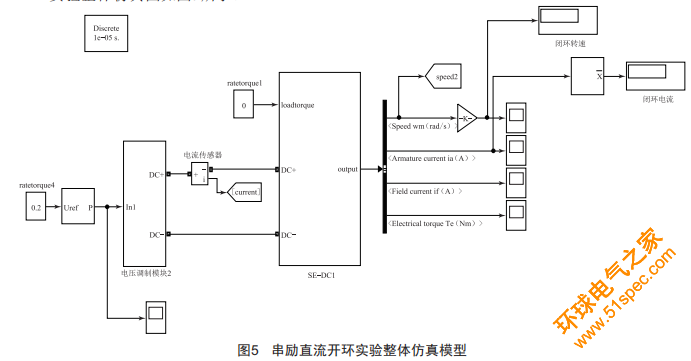
实验整体仿真图如图5所示。
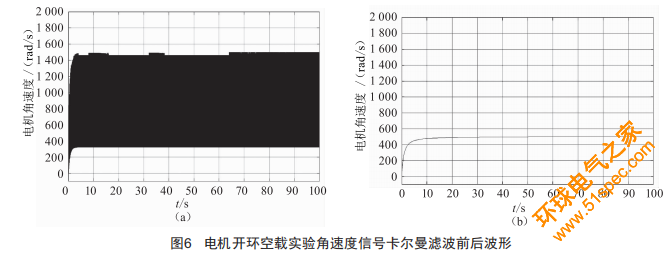
检测卡尔曼滤波前后角速度信号,示波器波形如图6所示。图6(a)为电机卡尔曼滤波前角速度信号,图6(b)为卡尔曼滤波后角速度信号,观察波形可以看出卡尔曼滤波器对角速度有很好的预测控制效果。
通过改变输入直流串励电电机的PwM波占空比来测量电机的转速,卡尔曼滤波后的电机转速与实际转速对比如表1所示。
根据光电编码器测得电机转速,通过表l可知卡尔曼滤波后转速误差率小于2%,滤波效果较好,此算法优化了电机输出的转速值,具有较好的控制精准度。
4结语
本文通过光电编码器来检测电机转速,再经过卡尔曼滤波器得出转速误差率小于2%,滤波效果较好。此算法优化了电机输出的转速值,证明了该系统具有较好的调控能力,能改善直流串励电机的动态性能,减少运行过程中噪声的影响,在供电侧利用同步Buck电路对电机进行稳定供电。模型易于操作,具有很好的实践应用价值,且应用领域广阔。
下一篇: PLC、DCS、FCS三大控
上一篇: 基于多旋翼无人机的系


