
发布日期:2022-10-09 点击率:28
引言
在现代生产系统中,工业机器人与PLC需要通信协作完成生产任务,即工业机器人输出信号给PLC,让PLC控制相关设备驱动机器人前端工具工作。本文主要分析基于DeviceNet现场总线技术的ABB工业机器人与PLC通信的问题。DeviceNet是自动化领域常见的一种网络通信方式,ABB工业机器人基于DeviceNet网络建立与西门子PLC通信的网络。
1配置DSQC652
ABB工业机器人常用的标准I/0板主要有5种[2],除了在设置时给它们分配的地址不同以外,它们的配置方法基本相同。本文主要对ABB标准I/0板DS0C652进行分析,该板主要基于DeviceNet网络构建通信模块。DS0C652板具有分布式I/0模块,有16个数字输入和16个数字输出接口,该板安装在ABB工业机器人控制柜里。首先,定义DS0C652板具体操作步骤,进入示教器控制面板,然后进入配置菜单(图1),选中DeviceNetDevice菜单,添加模板进入图2。ABB标准I/0板是挂在DeviceNet网络上的,所以要设定模块在网络中的地址。端子x5的6~12的跳线用来决定模块的地址,地址可用范围在10~63,在模板参数里修改参数完成DS0C652板设置。单击选择"使用来自模板的值"行的下拉菜单,选择"DS0C65224VDCI/0Device",然后需要设置的参数有I/0板在总线中的地址。
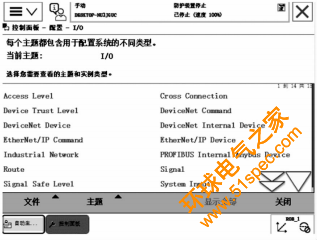
图1配置DSQC652
2配置信号与参数
完成DS0C652板设置后,将进行I/0信号设置,设置I/0信号是和PLC建立通信的基础,PLC通过I/0信号和DS0C652板与ABB工业机器人进行数据通信传输。如图3所示,在信号配置界面中,有许多系统建立后默认的I/0点,不允许修改,点击"添加"增加信号。在设置输入、输出信号时,它们的地址范围均是0~15。首先进入配置选项里的信号菜单设置输入、输出类型,修改相应参数,完成以后计算机提示需要重启设置。如果有多个信号需要定义,重启多次等待时间较长,那么可以点击"取消",等待所有信号定义完成后单击"是"按钮重新启动。信号设置完成以后,在ABB菜单中点击选择"输入输出"查看全部信号是否已经设置完成。
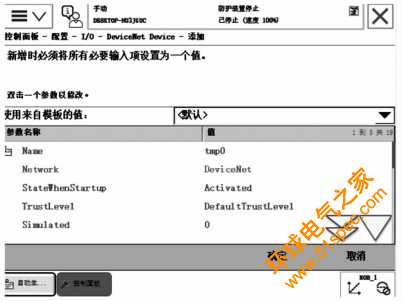
图2配置DSQC652参数
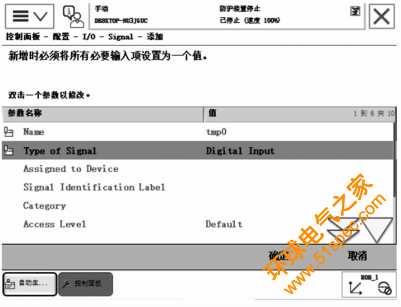
图3信号参数设置
在信号建立过程中应注意使用的DSoC652端口和PLC端口地址,建立相应的地址表,如表1所示。机器人通过I/o信号实现与PLC的交互。在设置过程中,PLC连接DSoC652的端口和地址号一定不能出现错误,如果地址设置错误,那么机器人与PLC通信将不能正常工作。
整个机器人示教器设置过程如图4所示。

3组态西门子PLC
PLC方面采用西门子S-1200PLC,西门子PLC需要在博图软件中进行组态编程,程序完成后便可以对机器人与PLC进行通信设置。首先在博图软件中选择设备与网络,随后添加新设备,选择控制器型号为西门子1212,如图5所示。在添加了设备以后需要对PLC网络进行设置,电脑与PLC必须在一个网段里面设置相应的IP地址,便于下载和上传PLC程序。设置完成后,点击左边项目树选择程序块,然后进入程序编写。整个程序编写完成后,可以通过ABB工业机器人示教器中输入输出菜单调用查看机器人是否接收到PLC发出的信号,也可以通过博图软件在线查看PLC是否接收到机器人发出的信号。在线路连接好的情况下,作业人员可以设置部分信号完成测试工作,如果测试通信正常,便可以进行进一步的PLC编程。
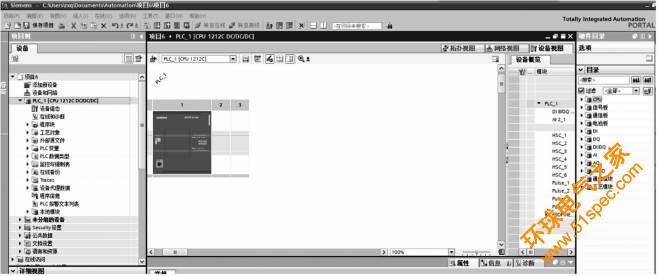
图5博图软件组态新设备
4结语
本文详细阐述了ABB工业机器人与西门子PLC进行通信设置的过程,充分利用工业现场总线技术的特点,在通信过程中以DeviceNet现场总线技术为基础进行了信号设置,实际操作验证了本文所述内容的可行性。在通信设置中,应特别注意地址信号等参数设置的过程。基于DeviceNet现场总线技术,ABB工业机器人与PLC通信能够更加快速、便捷地完成。
现代工业中,工业机器人与PLC的通信技术提高了生产线自动化水平,更能发挥工业机器人柔性特质和拓展特质,因此可以预见,通信技术在生产一线中的应用必将不断增加,从而对工业生产发挥更大的作用。
下一篇: PLC、DCS、FCS三大控
上一篇: 基于图数据库的配电网


