
发布日期:2022-10-09 点击率:97
iRVision 2.5D 视觉堆垛
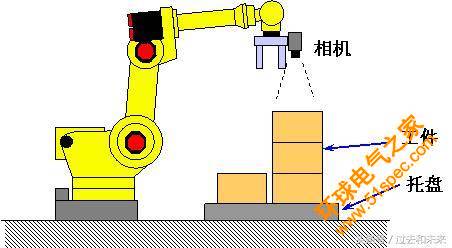
视觉堆垛程序通过相机视野内目标比例的变化来估算目标的高度并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
使用iRVision 2.5D允许机器人只借助一个普通2D相机来拾取码放堆集的目标。
 发那科工业机器人手部工业视觉功能详解" title="发那科工业机器人手部工业视觉功能详解" height="208" width="380"/>
发那科工业机器人手部工业视觉功能详解" title="发那科工业机器人手部工业视觉功能详解" height="208" width="380"/>
iRVision 视觉堆垛程序_1 (从寄存器R提取Z轴偏移)
此功能通过视觉计算寻找目标的2D位置和指定的寄存器数值,并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
寄存器R被用作存储已知的目标Z轴高度,或者通过距离传感器检测出的Z轴高度信息。

iRVision 视觉堆垛程序_2 (从堆垛层数提取Z轴偏移)
此功能通过视觉结合视觉检测结果和根据目标比例确定的目标层数(目标高度)计算目标的位置。目标层数依照参考比例和高度数据自动确定,因而,即使在视觉检测中存在细微的比例误差,也可以通过一个离散的层数(目标高度)来计算目标的具体位置。

下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV


