
发布日期:2022-04-18 点击率:52
摘要:视觉系统在机器人下芯系统中的应用,满足机器人作为柔性自动化生产线中要求视觉系统配合的需要,提高产品的合格率,提高产品质量,降低环境对人的危害。机器人自动化下芯工艺简化传统下芯流程,实现无人操作,生产效率高、精度高。经过很多项目验证,机器人自动化下芯系统性能稳定可靠。
铸造行业作为传统加工制造行业,在工业制造中发挥着非常关键的作用,下芯作为铸造行业中的一种非常重要的工艺,具有较高的技术难度,因为下芯的精度直接影响铸件的精度,下芯的位置偏差会影响金属液在砂箱中的流动。以前下芯工艺中均采用人工下芯,作业精度靠人工保证,作业精度差,工作环境恶劣,工厂空气高粉尘污染,对人体的危害很大。长泰机器人一直致力于铸造行业的生产工艺改进,非常熟悉铸造行业的现场状况,在应对铸造行业中的恶劣工作环境上有一套非常完善的解决方案------视觉系统。
视觉系统在机器人自动化下芯系统中的应用,很好的解决了下芯精度的问题,提高了产品的合格率和产品质量,并且降低了人工工作量,减少了人在恶劣工作条件下受到的伤害,视觉机器人自动化下芯系统正逐渐替代人工下芯成为铸造行业下芯系统主流。
视觉系统在下芯系统中应用的原理:
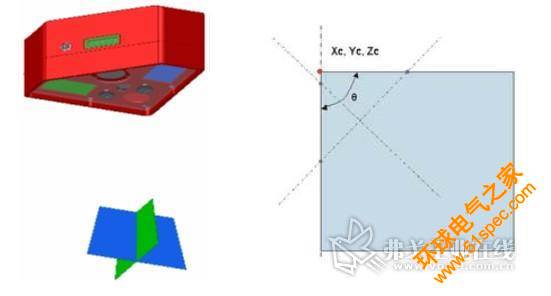
长泰机器人采用的三维视觉系统通过测量计算第一个砂芯(砂型)表面的工艺孔圆心或者直角点,建立工件坐标系,以工件坐标系为相对坐标系创建机器人的运行轨迹程序。对于每个新来的砂芯(砂型),由视觉系统对其测量并建立工件坐标系,将新建立的工件坐标系更新原来的工件坐标系,即更新机器人的工作轨迹,而新的机器人工作轨迹是完全符合新砂芯(砂型)位姿的。
视觉系统负责砂芯及砂型的识别定位,通过对砂芯和砂型的特征位进行识别,确定砂芯和砂型的种类,并精确定位砂芯和砂型,将种类信息和位置信息传送给机器人控制器,由控制器自动更新机器人抓取砂芯和下芯的工作路径,从而实现高质量的自动下芯过程。
视觉系统由结构激光组成,同时发射两条相交的激光束,光束到达物体表面后反射,由视觉接收器对反射信息进行捕捉,根据三角算法得到物体表面的信息。
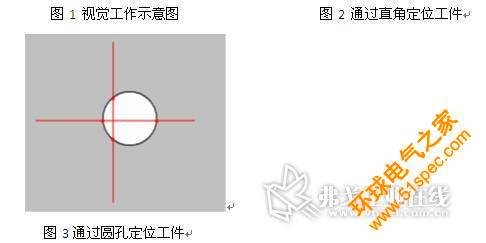
视觉系统对工件的定位方式分为两种,方法1:通过对工件表面的2个圆孔进行测量从而确定工件的6维方向数据信息;方法2:通过对工件直角特征部位进行测量从而确定工件的6维方向数据信息。
视觉系统在下芯系统中应用的忧点:
1) 超远的工作距离:正常的工作距离为385mm,其工作景深为150mm,因此可使得在视觉对砂型或砂芯进行测量时保持较远的工作距离,确保设备的安全性和远离污染区域,有效提高设备的使用寿命
2) 多样化工件定位算法:视觉系统集成多种算法,针对不同的工件和不同的定位解决方案,可选择对应的视觉定位算法,视觉系统将返回与算法对应的数据信息,功能无比强大
3) 超声波准确测量高度:视觉系统集成了超声波测距技术,可方便快速的利用超声波测量物体的高度,从而根据高度判断物体的种类,其高度测量精度可达0.2mm,高度测量距离为500mm。
4) 图象采集技术:不但从精度,效率,质量及稳定性方面优越,而且集成了二位图象采集技术,将视觉系统工作视场内的实时图象传送给远端监视器,使得工作人员无需到达现场即可通过监视器了解现场状况。
5) 具有IP65的防护等级使得视觉系统在铸造下芯作业的高粉尘环境中良好的工作,并能够准确定位。
视觉系统在下芯系统中的成功应用:
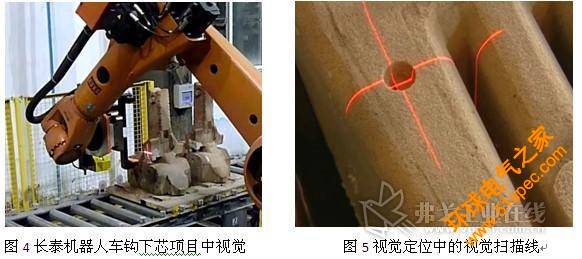
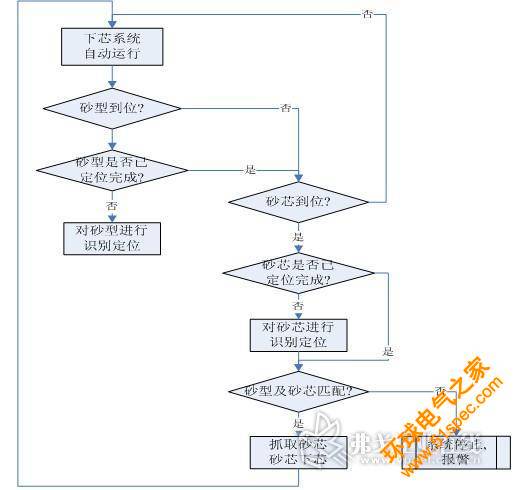
视觉在机器人自动化下芯工艺为:首先将砂型进行视觉扫描,确定砂型位置,然后再对砂芯进行视觉扫描,确定砂芯位置,两个位置确认完成后,机器人会根据视觉系统传递来的信号进行机器人姿态的自我调整,将机器人夹具位置调整至最优位置抓取砂芯放置与砂型中,进行下芯作业,完成下芯作业后,机器人回原位置等待。
工艺流程如下:
机器人自动化下芯系统视觉系统对砂箱和砂芯的要求为:
1) 砂箱、砂芯位置粗定位精度必须保证在60mm范围内,此范围为视觉系统的扫描搜索范围,范围过大将导致整体节拍过长。
2) 定位特征不能破损,这样才能保证下芯的精度和准确性,定位特征将根据砂芯砂箱的特点做成相应的形状,适合视觉系统的扫描。
视觉系统在机器人下芯系统中的应用技术日趋成熟,其定位精度高、环保、高效等优越性日趋凸显,逐渐得到各大厂家的认可。目前很多行业的下芯作业都拥有成熟的使用经验。如:铁路行业摇枕、侧架、方框芯的机器人下芯作业;发动机铸造行业缸体、缸盖的机器人下芯作业;铁路行业车钩的机器人下芯作业等。
齐齐哈尔轨道交通有限公司作为铁路机车行业的领头企业,在摇枕、侧架铸造工艺中十分重视下芯工艺的精度和效率的提高、重视工人的安全、重视企业生产线自动化水平的提高。2009年引进长泰机器人三维视觉机器人自动化下芯系统,由于系统稳定性高、易操作、性能优异,使得新的技术员很快能够学会其使用方法,得到良好的应用。其使用范围也在逐步扩大。
贵阳南车集团公司生产俄罗斯摇枕项目中,应用长泰机器人视觉下芯系统进行作业,应对大型砂芯作业,大大降低了人工下芯的作业强度,系统稳定高效,机器人作业精度高,得到俄罗斯客户的认可。
山西成凯车辆配件有限公司引进长泰机器人视觉下芯系统对K6摇枕、侧架下芯作业,并与长泰机器人多次合作,使机器人视觉下芯得以广泛应用。
随着人们对视觉系统在机器人下芯系统中认识的不断提高,希望能将这一技术扩展到铸造下芯的各行各业中去,为我国的基础制造水平的提升做更多的贡献。届时铸造行业三维视觉机器人自动化下芯系统将出现井喷式发展。
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV
型号:配件HS13BX-1000 操作机构
价格:¥111.6
库存:10
订货号:150002485
型号:配件HS13BX-400 操作机构
价格:¥133.8
库存:10
订货号:150000416
型号:HR3-200/32BX 100A
价格:¥432.336
库存:10
订货号:HR320032BX100
型号:配件DW15-630 操作机构
价格:¥201
库存:10
订货号:150007145


