
发布日期:2022-04-18 点击率:52
人类感知外部世界主要是通过视觉、触觉、听觉和嗅觉等感觉器官,而视觉,是人类最重要的感觉功能。视,就是看;觉,就是感觉、感知。据统计,人所感知的外界信息有80% 以上是由视觉得到的,“百闻不如一见” 这句话生动地说明了视觉对获得客观世界信息的重要性。通过视觉,我们可以感受到物体的位置,亮度以及物体之间的相互关系,感知外部世界丰富多采的信息。
然而,面对纷繁复杂的大千世界,人眼的感知能力也是非常有限的。如果用成像器件的某些指标去分析人眼,我们会发现一些有趣的结论:人眼的分辨率约为1600万像素左右,帧速率约为20fps 动态范围有14-16Bit左右,光谱响应范围为400nm-700nm。超出了这个范围,人眼将无法准确做出视觉分辨。
一直以来,人们都在努力寻找能够代替和弥补人眼先天不足的产品,以便拓展人类的视野,增强我们认识世界和改造世界的能力。由此,逐渐形成了一门新学科——机器视觉。
机器视觉,顾名思义就是用机器代替人眼来做测量和判断。它随着电视、半导体、计算机三大行业的发展而诞生并不断进步,如今在各行各业发挥着巨大作用。机器视觉理论构想出现在20世纪50年代。1947年贝尔实验室研制出第一个晶体管,拉开半导体行业的序幕。由于固态成像芯片的问世,1954年到1956年,全晶体管电视机和晶体管电子计算机先后问世,此时显示技术和数据处理技术已能初步满足人类需求。半导体技术的发展为机器视觉奠定了重要的技术基础,50年代后期,用机器来代替人类视觉的想法被人首次提出。
十九世纪末,德国电气工程师尼普柯夫进行了首次发射图像的实验,尽管当时画幅只有24行线,图案也相当模糊,但这标志着一个改变时代的产物——电视机的诞生。在其后的60余年内电视技术不断发展,逐渐能同时播放图像和声音,20世纪30年代电子管电视问世,之后又出现了彩色电视系统。
1947年贝尔实验室研制出第一个晶体管,拉开半导体行业的序幕。半导体技术带来了真正的固态成像芯片,1954年,第一台全晶体管电视机问世,电视摄像机技术由电子管时代迈入晶体管时代;1956年,晶体管电子计算机问世。半导体技术的发展为机器视觉奠定了重要的技术基础,在显示技术和数据处理技术飞速进步的50年代,机器视觉理论构想被初步提出。
1961年,集成电路研制成功,随后随着20世纪60年代集成电路电视机和集成电路计算机先后横空出世。问世,1967年,世界上最早的机器视觉系统诞生在1967年了。系统采用了闭路电视成像,将视频信号传输到电子电路中用于检测工件。虽然隔行扫描、模拟信号、固定分辨率在现在看起来相当落后,但这标志着机器视觉由理论变为现实。
1969年,美国贝尔实验室的两位科学家威廉.博伊尔和约翰.史密斯发明CCD图像传感芯片,这个划时代的发明使人们可以数字信号的模式获得图像信息,为图像技术带来巨大飞跃。
时间进入70年代,大规模、超大规模电子计算机先后出现,图像技术也在日新月异的发展, 各方面技术都较为成熟,机器视觉进入了真正的发展期。
80年代开始,个人电脑行业大举兴起,机器视觉技术伴随着PC的更新和普及得到了飞速的成熟和发展,现如今机器视觉已从最开始的半导体检测到现在渗透到各行各业,与我们的生活息息相关。


和人类视觉相比较,机器视觉的优势非常明显:
精准性一受生理条件的限制,人眼在光谱波段、分辨率和速度上都存在生理极限,超出此极限后人眼就无法进行正确的判断。机器视觉以其区域广阔的分辨率和帧频占据明显优势。相机分辨率从最常见的VGA分辨率到千万像素级分辨率,帧频从个位数到几百fps均可自由选择,工作环境无论是在可见光下还是红外、X光等特殊环境均可找到相应的机器视觉系统。
稳定性一个体差异在人类中广泛存在,且人类的情绪变化会对自身主观判断造成影响。人眼进行视觉判断所得结果通常会因人员的不同而出现各种误差,固定人员心情不同时做出的视觉判断也会有不同的结果。机器视觉系统各部分均由机器元件组成,其良好的稳定性和客观性保证了所得结果能保持一致。
重复性一人类会因工作时间的持续、工作内容的重复而产生生理状态的变化,如劳累疲倦等,从而对视觉产生影响。而机器视觉系统则可以在长时间重复性的工作中保持相同的状态,保证每一次的工作结果都能达到同样的标准。
速度快一在视觉速度上,机器可以轻松达到人类可望不可及的高度。当工作对象是运动物体特别是高速运动的物体时,比如说生产线上,机器视觉代替人类视觉能够大幅度提高生产效率。
低成本一机器运动速度快,一台机器可以轻松承担几个人的工作量。另外机器可以连续工作,不需要休息、请假,可以在提高产能的同时节省人工开支。
非接触—机器视觉系统在工作时不和工作对象产生接触,对双方对象均不会产生任何损伤,尤其是在一些具有危险性、恶劣的或高精密的工作项目和环境中,可代替人进行视觉类工作,降低人工操作风险,提高产品精密性。
一般来说,机器视觉系统一般由以下五大部分组成:光源、镜头、相机、图像采集卡和处理软件。光源、镜头、相机组成前端的成像系统,决定了系统成像的好坏;采集卡和处理软件组成后端的图像处理系统,主要负责对图像进行分析处理的算法研究、软硬件优化技术、硬件处理技术等。
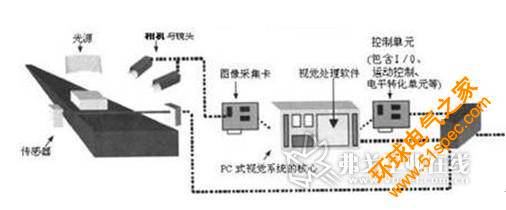
相机是前端成像系统中的核心器件,相机中的芯片是决定相机性能的关键部分。机器视觉中主要采用的两类光电传感芯片分别为CCD芯片和CMOS芯片,这两类芯片在技术上有很大差别,但他们的作用都是通过光电效应将光信号转换为电信号进行存储以获得图像。二者的成像过程都同样按以下步骤:
1.光电转换(将入射光信号转换成电信号)
2.电荷收集(以一定的形式收集并贮存代表入射光能量的电荷信号)
3.信号转换与输出(CCD以模拟信号的形式输出,CMOS可以直接输出数字信号)
CCD和CMOS芯片都是由结构为金属-氧化物-半导体(MOS结构)的像元阵列构成,每个像元都起到吸收光强,并转换为光生电荷信号的作用。二者不同之处在于:
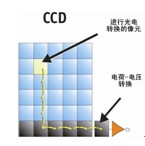
? CCD芯片采用一个读出节点将所有像元中产生的电荷信号转换成电压,因此需要通过电荷转移将所有像元中的电荷依次转移到读出节点进行电荷-电压转换并读出。
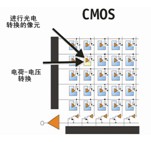
? CMOS芯片像元中产生的电荷信号在像元内部直接转化为电压信号,不需要进行电荷转移,每个像元直接输出电压信号。
两种芯片相比较来说,CMOS芯片制作工艺相对较为简单,价格相对低廉,成品尺寸限制较小,耗能较小,但由于CMOS芯片结构决定其各个像元独立进行电荷-电压转换,每个像元中放大器之间的差异导致长期以来CMOS芯片成像质量劣于CCD芯片,噪声较高,一般用于图像质量要求较低的场合。随着近年来CMOS芯片技术的不断革新,CMOS芯片光电灵敏度提高,噪声减小,动态范围扩大,成像质量提高,性能参数逐渐和CCD芯片相接近,再加上其本身的固有优势,CMOS芯片目前正在得到越来越广泛的应用。
视觉软件是整个机器视觉系统的另一个重要组成部分,视觉软件主要通过对图像的分析、处理和识别,实现对特定目标特征的检测。由于机器视觉系统在现代工业领域的广泛应用,使应用于机器视觉系统的图像处理软件技术得到了高速发展。
图像处理和分析工具主要功能是进行图像增强,便于后续的专业视觉工具进行识别和理解。常用的图像处理和分析工具包括:直方图工具、滤波操作、形态学操作、轮廓提取、几何变换、颜色空间变换。
专业视觉工具是专门针对机器视觉应用特性开发的综合视觉工具,最主要的四大功能包括:标定工具、定位工具、测量工具、检测工具。
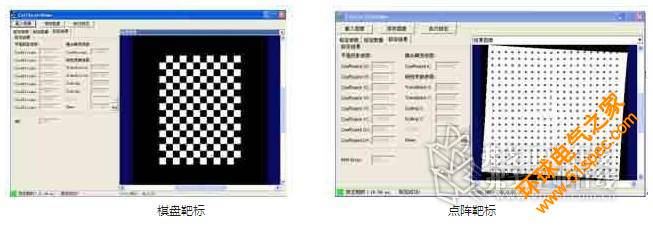
标定工具
标定工具的主要功能是建立图像像素空间与真实物理空间的映射关系,实现由图像坐标到空间坐标的转换。常用靶标类型为棋盘靶标、点阵靶标。
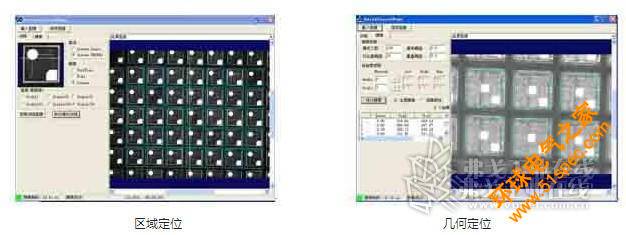
定位工具
定位工具的目的为在图像中确定一个或多个预先训练过得特征的位置,并对其质量进行度量。
测量工具的目的在于利用图像对物体的2-D尺寸进行准确测量,实现对产品质量的检测。
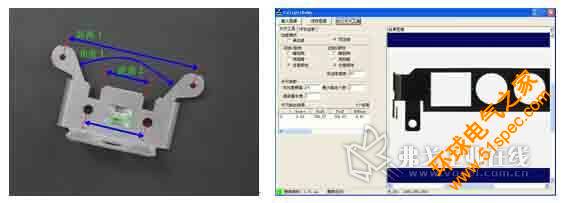
测量工具
检测工具
检测工具能够高效的产生实时图像与模版图像之间的差值图像,是缺陷检测中非常重要的一个环节。

检测工具
此外,专业视觉工具还包括二维特征分析工具、字符识别工具、条码识别工具、颜色分析工具。
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV


